Samenwerkend Autonoom Vervoer op Bedrijventerreinen (SAVED)

Met dit onderzoek proberen we antwoord te geven op de vraag: "Hoe kan geautomatiseerd en collaboratief hub-to-hub transport worden ontworpen, en wat is de impact in termen van People, Planet en Profit op de logistieke waardeketen van bedrijventerreinen”?
Logistieke bedrijven worstelen om hun supply chain kosteneffectief, betrouwbaar en duurzaam te houden door de veranderende vraag, toenemende concurrentie en groeiende service-eisen. Van de hele supply chain, zijn de first en last mile logistics misschien wel het moeilijkste aspect. Connected Automated Transport (CAT) is een technologische ontwikkeling voor de first en last mile. Maar ondanks het readiness level van CAT, blijft commerciële inzet uit door problemen met de rendabele integratie in bestaande logistieke processen en infrastructuren.
Belangrijkste doelstellingen:
- Een digital logistic twin van de logistic supply chain
- Het ontwikkelen van een planner taxonomie
- Het realiseren van een robust and secure information flow
Over dit onderzoeksproject en de aanpak
Digital Twinning, een digitaal model van een fysieke situatie dat de situatie in een live omgeving simuleert, is de basis van SAVED. In een digital twin van XL-Business Park kunnen de grenzen van CAT veilig worden verkend.
Digital twin-benadering
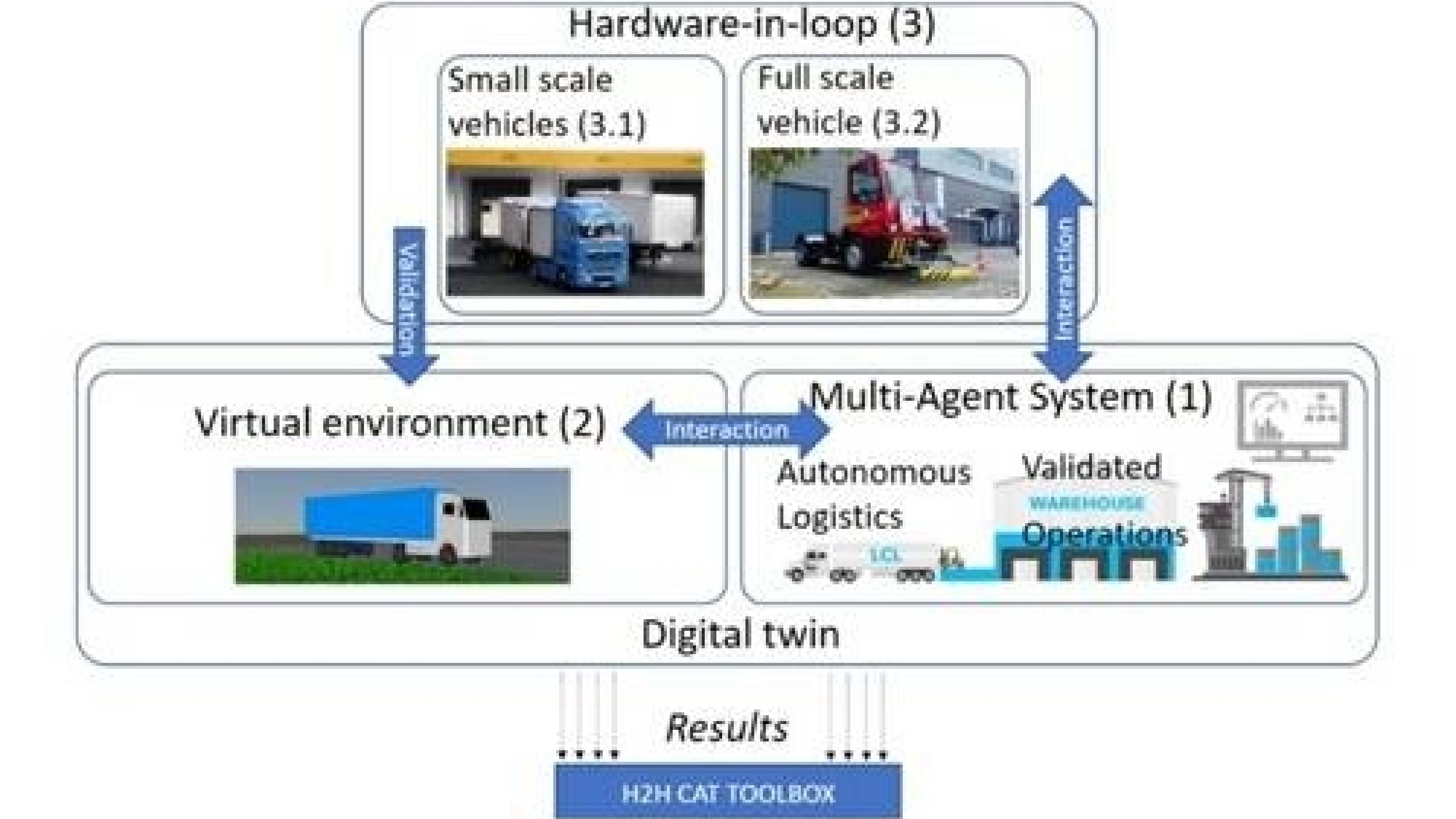
De bovenstaande schematische weergave (klik op + voor de complete weergave) van de digital twin-benadering in SAVED. In de praktijk bestaat CAT grofweg uit twee domeinen: automatisering van planning (operations) en automatisering van voertuigen (technisch). Deze domeinen worden gemodelleerd in de digital twin, in respectievelijk (1) het Multi-Agent Systeem (MAS), de virtuele omgeving (2). Het MAS omvat submodellen voor de logistieke planning, de toewijzing van taken en algoritmen om controle te delegeren aan autonome agenten. Deze modellen interageren dan met de virtuele omgeving, die de CAT voertuig en de infrastructuur van het XL-Business Park omvat.
Real-time aspecten zoals rekentijden van planningsalgoritmes, prestaties van veiligheidssystemen (obstakeldetectie en -vermijding), communicatievertragingen, interactie met realistische verkeersstromen en prestaties van trajectvolgende voertuigcontroles zijn aanwezig in het echte leven en kunnen niet gesimuleerd worden in een open-loop situatie. In een digitale twin worden deze real-time aspecten geanalyseerd in een closed loop situatie, waardoor real-time aspecten geëvalueerd kunnen worden. Om deze aspecten te valideren zal een Hardware-in-loop (HIL) omgeving (3) opgezet en gebruikt worden met het MAS.
Ten slotte, een wordt een effectbeoordeling van de ontwikkelde CAT-oplossingen zal value propositions opgeleverd, die inzicht geeft in schallingseffecten. Een universele H2H CAT toolbox moet bedrijventerreinen helpen om via specifieke informatie (grootte, aantal bedrijven, etc) de value propositie van het gebruik van CAT voor hun bedrijventerrein.
Centrale onderzoeksvraag: "Hoe kan geautomatiseerd en collaboratief transport tussen hubs worden ontworpen, en wat is de impact wat betreft People, Planet en Profit (PPP) op de logistieke waardeketen van bedrijventerreinen van verschillende grootte, lay-out en verschillende verkeerssituaties (gemengde/ongemengde infrastructuur)?".
Belangrijkste deliverables
- Een virtuele omgeving met voldoende natuurgetrouwheid voor het ontwikkelen en testen van geautomatiseerde oplossingen voor transportprocessen binnen bedrijventerreinen
- Situatieanalyse van het bedrijvenpark om een algemeen begrip te krijgen van managementproblemen, relaties tussen bedrijven en controleprocessen
- Algoritmen/regelsets om eerlijk gebruik van (gedeelde) bronnen te vergemakkelijken
- Een modulaire fysieke omgeving op laboratoriumniveau van het XL-Bedrijvenpark
- Logistiek, Bedrijfsmodellering, Morfologisch diagram)
Updates en nieuwsberichten
Onderzoekspartners











